|
271 |
|
Lead Compensator for a Type 0 … 댓글14개

[자동제어]
|
cemtool |
08-14 |
조회 19981
다음과 같은 3차 시스템에 대해서 = 9이고, phase margin이 최소한 25°가 되도록 lead compensator를 설계하시오.
ex6_15p.cem/*
Example 6.15 Lead Compensator for a Type 0 System
*/
del *;
"********************…
|
|
270 |
|
감쇠비에 따른 시간 그래프 댓글71개
[기타]
|
cemtool |
08-13 |
조회 64677
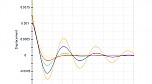
고유진동수가 w=2이고 초기조건이 mm, 이며, 다음 값들의 감쇠비 : 를 갖는 감쇠계에 대해 VTB1_1.cem을 이용하여 x(t)를 그려라.ex1_4.cem% This file is a solution file of TB 1.4
m = 1;
omega = 2;
k = omega^2;…
|
|
269 |
|
초기속도 값의 범위에 대한 응답 그리기 댓글117개
[기타]
|
cemtool |
08-13 |
조회 248236
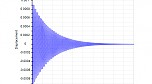
지면에 고정된 탁자에 한 쪽을 용접하여 고정시키고 다른 한 쪽은 12mm볼트로 용접하여 자유로이 움직이는 약 30mm길이의 스프링을 생각해 보자. 이 시스템의 질량은 약 Kg 이며, 스프링 강성은 857.8N/m이고, 감쇠계수는 0.11Kg/s이다. m,c,k와 x(0)의 값들을 고정시키고[mm][x(0)=1mm] VTB1_1.cem을 이용하여 응…
|
|
268 |
|
Lead Compensation via Frequenc… 댓글50개
[자동제어]
|
cemtool |
08-12 |
조회 65018
G(s)가 다음과 같이 주어진 시스템에서, 단위 계단 입력에 대한 정상 상태의 오차가 0.1미만이고, overshoot < 25%이 되도록 하는 lead compensator를 설계하시오.
ex6_14p.cem/*
Example 6.14 Lead Compensation via Frequency Response
*/
&n…
|
|
267 |
|
Bode's Gain-phase Relatio… 댓글79개
[자동제어]
|
cemtool |
08-12 |
조회 84389
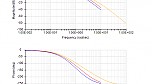
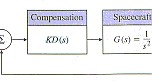
다음의 그림과 같이 정의된 우주비행체 고도 제어기에 대해서, damping 특성이 좋고 또한 대략 0.2rad/sec의 좋은 bandwidth를 갖도록 하는 KD(s)의 적절한 표현식을 구하시오.
ex6_13p.cem/*
Example 6.13 Bode's Gain-phase Relationship in Spacecraft Attitude Contro…
|
|
266 |
|
Nyquist Plot for a System with… 댓글98개
[자동제어]
|
cemtool |
08-12 |
조회 118379
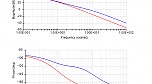
다음과 같이 주어지는 시스템의 Nyquist plot을 그리고, Bode plot을 그려서 stability margin을 구하시오.
ex6_12p.cem/*
Example 6.12 Nyquist Plot for a System with Multiple Crossover Frequencies
*/
del *;
"*********…
|
|
265 |
|
Stability Properties for a con…
[자동제어]
|
cemtool |
08-11 |
조회 16737
개루프 전달함수가 다음과 같이 주어진 시스템에서, 안정성(stability)을 gain K에 대한 함수로 정하시오.(root locus와 nyquist plot을 그려서)
ex6_11p.cem/*
Example 6.11 Stability Properties for a conditionally Stable System
*/
del …
|
|
264 |
|
Nyquist Plot for an Open-loop … 댓글2개
[자동제어]
|
cemtool |
08-11 |
조회 17372
이번에는 G(s)가 다음과 같이 주어질 때, 위의 [2차 시스템의 nyquist 선도 예제]와 같이 시스템의 안정성을 조사하시오.
ex6_10p.cem/*
Example 6.10 Nyquist Plot for an Open-loop Unstable System
*/
del *;
"***************************…
|
|
263 |
|
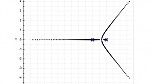
3차 시스템의 Nyquist 선도 댓글45개
[자동제어]
|
cemtool |
08-11 |
조회 39364
이번에는 G(s)가 다음과 같이 주어지고 위의 [예제 6.8]에 있는 그림과 같은 모양으로 주어지는 폐루프 시스템의 안정성을 조사하시오.
ex6_9p.cem/*
Example 6.9 Nyquist Plot for a Third-order System
*/
del *;
"*********************************…
|
|
262 |
|
2차 시스템의 Nyquist Plot
[자동제어]
|
cemtool |
08-08 |
조회 17795
다음 그림과 같이 정의된 시스템의 안정성(stability)을 조사하시오.(Root locus, Bode plot, Nyquist plot 등을 그려서)
ex6_8p.cem/*
Example 6.8 Nyquist Plot for a Second-order System
*/
del *;
"*************************…
|
|
261 |
|
Bode plot 그리기 댓글60개
[자동제어]
|
cemtool |
08-08 |
조회 42460
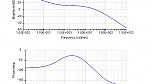
다음과 같은 전달함수로 주어지는 시스템에 대해서 크기와 위상에 대한 Bode plot을 그리시오.
6.3
6.4
6.5 ex6_3_5p.cem/*
Exercise 6.68*/
del *;
"************************"
"** **"
"** …
|
|
260 |
|
Autopilot Design 댓글67개
[자동제어]
|
cemtool |
08-08 |
조회 68193
Piper Dakota의 elevator 입력과 pitch 고도 사이의 전달함수가 다음과 같이 주어진다.
여기서
θ = pitch 고도, degrees δe = elevator 각, degrees
(a) step elevator 입력에 대한 응답의 상승시간(rise time)이 1초 이하이고 overshoot가 10%미만이 되도록 하는 자동 조…
|
|
259 |
|
Compensator 설계하기
[자동제어]
|
cemtool |
08-07 |
조회 16893
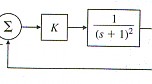
어떤 시스템이 다음과 같은 전달함수로 주어진다.
이때, 개루프 damping 이고 고유 주파수 의 조건을 만족하도록 compensator를 설계하시오.ex5_13p.cem/*
Example 5.13 Design of Lead Compensation
*/
del *;
"**************…
|
|
258 |
|
PI제어기 범위구하기
[자동제어]
|
cemtool |
08-07 |
조회 16591
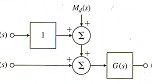
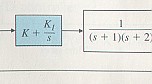
다음 그림의 PI feedback system이 asymptotically stable하기 위한 제어기의 gain (K, KI)의 범위를 구하시오.
ex4_21p.cem/*
example 4.21 Stability Versus Two Parameter Ranges
*/
del *;
"*********…
|
|
257 |

|
다양한 전달함수의 root-locus 그리기
[자동제어]
|
cemtool |
08-07 |
조회 18570
다음과 같이 주어진 전달함수의 root-locus를 그리시오.
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9 ex5_1_9p.cem/*
example 5.1 Root Locus for a DC Motor
*/
…
|















