|
154 |
|
root locus 댓글59개

[자동제어]
|
cemtool |
09-18 |
조회 132535
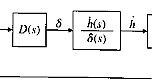
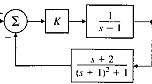
전달함수가 다음과 같이 주어지는 자동 조종 시스템을 생각해 보자.
이 시스템의 block diagram은 다음 그림과 같다. 이때 다음의 물음에 답하시오.
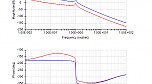
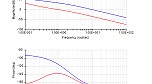
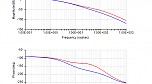
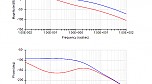
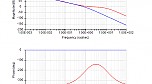
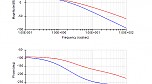
(a) CEMTool을 이용하여, D(s)=K=1일 때, 개루프 시스템의 Bode plot을 그리시오.
(f) CEMTool을 이용하여 K에 관한 root locus를 그리시오…
|
|
153 |
|
parameter 결정하기 댓글1개
[자동제어]
|
cemtool |
09-18 |
조회 14282
전달함수가 다음과 같이 주어지는 인공위성 고도 제어 시스템을 생각하자.
이때, double lead network를 사용하여 GM=2(6dB)이고 PM=45°이도록 parameter를 결정하시오.ex6_53.cem/*
Exercise 6.53*/
del *;
"************************"
"** …
|
|
152 |
|
lead compensator 설계하기 댓글2개
[자동제어]
|
cemtool |
09-17 |
조회 14481
다음과 같은 type Ⅰ의 unity feedback 시스템에서 이고 PM > 40°가 되도록 하는 lead compensator를 설계하시오.
ex6_52.cem/*
Exercise 6.52*/
del *;
"************************"
"** **"
"…
|
|
151 |
|
폐루프 시스템의 compensator 설계하기 댓글22개
[자동제어]
|
cemtool |
09-17 |
조회 20954
어떤 unity feedback 시스템의 개루프 전달함수가 다음과 같이 주어진다.
이때, 폐루프 시스템이 다음과 같은 specification을 만족하도록 하는 compensator를 설계하시오.
● 단위 ramp 입력에 대한 정상 상태의 오차가 0.01 미만이어야 한다.
● PM = 45°±3°
● ω< 0.2 rad/sec인 si…
|
|
150 |
|
폐루프 시스템의 compensator 설계하기 댓글3개
[자동제어]
|
cemtool |
09-17 |
조회 14106
전기자의 인덕턴스를 무시할 수 있는 어떤 DC motor의 개루프 전달함수가 다음과 같이 주어진다.
이때, 폐루프 시스템이 다음과 같은 specification을 만족하도록 하는 compensator를 설계하시오.
● 단위 ramp 입력에 대한 정상 상태의 오차가 1/150 미만이어야 한다.
● 단위 step 응답의 overshoot가 25…
|
|
149 |
|
lead compensator 설계하기 댓글2개
[자동제어]
|
cemtool |
09-16 |
조회 15146
어떤 unity feedback 시스템의 개루프 전달함수가 다음의 식과 같이 주어진다.
이때, 폐루프 시스템이 다음과 같은 specification을 만족하도록 하는 lead compensator를 설계하시오.
● 단위 ramp 입력에 대한 정상 상태의 오차가 0.01 미만이어야 한다.
● dominant 폐루프 pole에 대해서 dampi…
|
|
148 |
|
lag compensator 설계하기 댓글1개
[자동제어]
|
cemtool |
09-16 |
조회 14613
어떤 unity feedback 시스템의 개루프 전달함수가 다음의 식과 같이 주어진다.
이때, 폐루프 시스템이 다음과 같은 specification을 만족하도록 하는 lag compensator를 설계하시오.
● 단위 ramp reference 입력에 대한 정상 상태의 오차가 0.01 미만이어야 한다.
● PM=40°±3°ex6_47.cem…
|
|
147 |
|
dynamic compensator 설계하고 root … 댓글20개
[자동제어]
|
cemtool |
09-16 |
조회 20352
nverted pendulum balancer가 다음의 전달함수와 같이 modeling된다.
PM이 30°가 되는 dynamic compensator를 설계하고, root locus, Bode plot을 그리시오.ex6_46.cem/*
Exercise 6.46*/
del *;
"************************…
|
|
146 |
|
lead compensator 설계하기 댓글1개
[자동제어]
|
cemtool |
09-15 |
조회 14433
다음 그림과 같은 시스템을 생각하자.
이때, G(s)가 다음의 식과 같이 주어질 때, unity DC 이득을 갖고 PM≥40°인 lead compensator를 설계하시오.
ex6_44.cem/*
Exercise 6.44*/
del *;
"************************"
"** …
|
|
145 |
|
lead compensator 설계하기 댓글28개
[자동제어]
|
cemtool |
09-15 |
조회 21514
다음과 같은 3차 servo 시스템에 대해서 PM=52°이고 GM=4.4가 되도록 하는 lead compensator를 설계하시오.
ex6_43.cem/*
Exercise 6.43*/
del *;
"************************"
"** **"
"** Exercise 6…
|
|
144 |
|
bode plot 댓글1개
[자동제어]
|
cemtool |
09-15 |
조회 14941
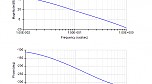
배의 조종 시스템이 다음과 같은 전달함수로 주어질 때, CEMTool의 bode 명령을 이용하여 K=2일 때의 G(jω)의 log 크기와 위상을 그리시오.
ex6_37.cem/*
Exercise 6.37*/
del *;
"************************"
"** **"
"**…
|
|
143 |

|
bode plot, root locus 댓글1개
[자동제어]
|
cemtool |
09-15 |
조회 15435
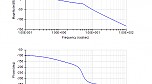
다음과 같이 주어지는 시스템의 bode plot과 root-locus를 그리시오.
ex6_30.cem/*
Exercise 6.30*/
del *;
"************************"
"** **"
"** Exercise 6.30 **"
"** …
|
|
142 |
|
bode plot, root locus 댓글1개
[자동제어]
|
cemtool |
09-15 |
조회 15867
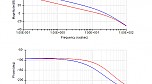
개루프 전달함수가 다음과 같이 주어진 unity feedback 시스템을 생각하자.
먼저 K=1이라고 가정하고 Bode plot을 그리고, 다음에는 K에 대한 root locus를 그리시오.ex6_27.cem/*
Exercise 6.27*/
del *;
"************************"
"** …
|
|
141 |
|
root locus, nyquist plot 댓글2개
[자동제어]
|
cemtool |
09-15 |
조회 16257
다음 그림과 같이 주어진 시스템에서 K가 0에서 무한대까지 변화할 때, 폐루프 pole의 root-locus를 그리고, 또한 Nyquist plot을 그리시오.
ex6_21.cem/*
Exercise 6.21*/
del *;
"************************"
"** **"…
|
|
140 |

|
bode, nyquist plot 댓글24개
[자동제어]
|
cemtool |
09-12 |
조회 21847
다음 그림에서 G(s)가 다음의 식과 같이 주어질 때, 주파수 응답 G(jω)에 대한 Bode plot을 그리고, 또한 Nyquist plot을 그리시오.
ex6_20.cem/*
Exercise 6.20*/
del *;
"************************"
"** **"
"…
|















