|
94 |
|
Bode plot 그리기 댓글60개

[자동제어]
|
cemtool |
08-08 |
조회 42477
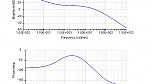
다음과 같은 전달함수로 주어지는 시스템에 대해서 크기와 위상에 대한 Bode plot을 그리시오.
6.3
6.4
6.5 ex6_3_5p.cem/*
Exercise 6.68*/
del *;
"************************"
"** **"
"** …
|
|
93 |
|
Autopilot Design 댓글67개
[자동제어]
|
cemtool |
08-08 |
조회 68205
Piper Dakota의 elevator 입력과 pitch 고도 사이의 전달함수가 다음과 같이 주어진다.
여기서
θ = pitch 고도, degrees δe = elevator 각, degrees
(a) step elevator 입력에 대한 응답의 상승시간(rise time)이 1초 이하이고 overshoot가 10%미만이 되도록 하는 자동 조…
|
|
92 |
|
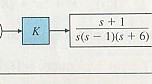
Compensator 설계하기
[자동제어]
|
cemtool |
08-07 |
조회 16896
어떤 시스템이 다음과 같은 전달함수로 주어진다.
이때, 개루프 damping 이고 고유 주파수 의 조건을 만족하도록 compensator를 설계하시오.ex5_13p.cem/*
Example 5.13 Design of Lead Compensation
*/
del *;
"**************…
|
|
91 |
|
PI제어기 범위구하기
[자동제어]
|
cemtool |
08-07 |
조회 16595
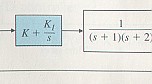
다음 그림의 PI feedback system이 asymptotically stable하기 위한 제어기의 gain (K, KI)의 범위를 구하시오.
ex4_21p.cem/*
example 4.21 Stability Versus Two Parameter Ranges
*/
del *;
"*********…
|
|
90 |

|
다양한 전달함수의 root-locus 그리기
[자동제어]
|
cemtool |
08-07 |
조회 18573
다음과 같이 주어진 전달함수의 root-locus를 그리시오.
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9 ex5_1_9p.cem/*
example 5.1 Root Locus for a DC Motor
*/
…
|
|
89 |
|
P제어기의 안정성 범위 구하기 댓글13개
[자동제어]
|
cemtool |
08-06 |
조회 19108
다음 그림과 같은 시스템에서 시스템의 안정성은 proportional gain K의 함수이다. 시스템이 stable하게 되는 K의 범위를 구하시오.
ex4_20p.cem/*
example 4.20 Stability Versus Parameter Range
*/
del *;
"****************…
|
|
88 |
|
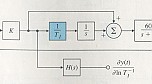
시스템 시간에 대한 영향
[자동제어]
|
cemtool |
08-06 |
조회 16072
그림과 같이 PI 제어기가 달린 1차 시스템에서 정수 시간 의 역수가 design parameter이다. proportional gain K=0.18 이고, 의 값을 220으로 할 때, 에 대한 output sensitivity function을 구하시오.
ex4_9p.cem/*
example 4.9 PI Co…
|
|
87 |
|
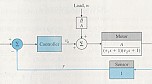
P,PI,PID 제어기의 영향 댓글12개
[자동제어]
|
cemtool |
08-06 |
조회 19638
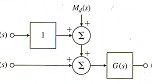
다음의 그림과 같은 속도 제어 시스템에서 parameter가 다음과 같이 주어지고,
reference 속도는 100 rad/sec이다. 이 때, 제어기의 parameter가 일 때, 시스템이 응답에 대한 proportional, PI-, PID 제어기의 영향을 논의하시오.ex4_8p.cem/*
example 4…
|
|
86 |
|
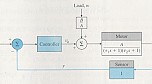
과도 상태 응답
[자동제어]
|
cemtool |
08-05 |
조회 15814
다음 그림과 같은 feedback 속도 제어 시스템에서, steady-state disturbance을 차단하는 능력이 개루프 일 때 보다 100배 이상 개선되도록 하는 gain K값을 정하고 이때의 과도 상태 응답을 구하시오.
ex4_5p.cem/*
example 4.5 Closed-loop Proportional Speed Contr…
|
|
85 |

|
Step 응답
[자동제어]
|
cemtool |
08-05 |
조회 15451
load가 연결되어 있는 어떤 모터 시스템의 전달함수는 다음과 같은 모양으로 주어진다.
각 parameter가 로 주어지고, gain이 0.1일 때, w=-0.1 N·m인 load input에 대한 step 응답을 구하시오.
ex4_4p.cem/*
example 4.4 Open-loop Speed Control: Transient D…
|
|
84 |
|
시간 응답 곡선 구하기 댓글16개
[자동제어]
|
cemtool |
08-05 |
조회 16974
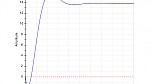
다음 그림과 같은 단진자에 대해 처음 10초 동안의 시간 응답 곡선을 구하시오.
, for , for · l=1m · m=0.2kg
(a) 교재의 식 (2.12)의 선형 근사식을 이용하시오. (b) 교재의 식 (2.11)의 비선형 식을 이용하시오. © 로 하여 위의 (a)와 (b)를 반복하시오.e…
|
|
83 |
|
Impulse 응답 3
[자동제어]
|
cemtool |
08-04 |
조회 15610
Boeing-747 기체의 승강타와 고도의 관계를 다음과 같은 전달함수로 근사화할 때, -1°의 impulse 승강타 입력에 대한 시간 응답 곡선을 구하시오.
ex3_26p.cem/*
example 3.26 Aircraft Response Using CEMTool
*/
del *
"****************…
|
|
82 |
|
Impulse 응답 2
[자동제어]
|
cemtool |
08-04 |
조회 15349
다음 시스템의 impulse 응답을 구하시오.
ex3_24p.cem/*
example 3.24 Oscillatory Time Response
*/
del *;
"***************************************"
"** …
|
|
81 |
|
Impulse 응답 1
[자동제어]
|
cemtool |
08-04 |
조회 15531
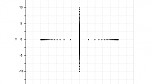
전달함수가 다음과 같이 주어진 시스템의 impulse 응답을 구하시오.
ex3_23p.cem/*
example 3.23 Response versus Pole Locations, Real Roots*/
del *;
"********************************************************"…
|
|
80 |

|
부분분수
[자동제어]
|
cemtool |
08-04 |
조회 15183
다음과 같이 미분 방정식 형태로 주어진 식을 state 형태로 나타내고, 전달함수를 구하여 부분분수로 전개하여라.
ex3_19p.cem/*
example 3.19 Transformations Using CEMTool
*/
del *;
"******************************************…
|















