















자동제어 | 가변파라미터에 대한 Root-Locus |
페이지 정보
작성자 cemtool 작성일14-04-22 13:25 조회17,295회 댓글0건본문
다음의 방정식을 가진 시스템을 생각해보자.
«풀이»
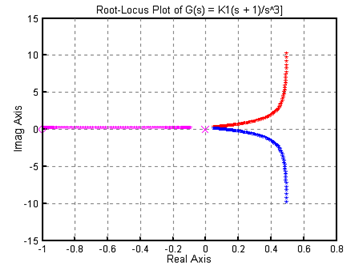
(1) 에 대한 근컨투어 먼저
이라고 놓고 방정식을
으로 나누면
- ex6_17.cem
num = [1 1]; den = [1 0 0 0]; rlocus(num, den); title("Root-Locus Plot of G(s) = K1(s + 1)/s^3]")
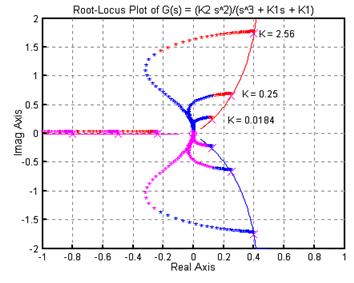
(2) 에 대한 근컨투어
이 0이 아닌 정수라고 가정하고
에 대하여 방정식을 정리하면
- ex6_17.cem
num = [1 0 0]; // K1 = 0.0184den1 = [1 0 0.0184 0.0184]; rlocus(num, den1); holdon // K1 = 0.25den2 = [1 0 0.25 0.25]; rlocus(num, den2); // K1 = 2.56den3 = [1 0 2.56 2.56]; rlocus(num, den3); title("Root-Locus Plot of G(s) = (K2 s^2)/(s^3 + K1s + K1)")
결과로 나온 그래프의 x축 범위를 [-1,1]로, y축 범위를 [-2,2]로 조정하면 그림 6-2의 그래프를 얻을 수 있다.
댓글목록
등록된 댓글이 없습니다.