















자동제어 | 뒤짐보상기로 보상한 시스템의 단위계단응답 |
페이지 정보
작성자 cemtool 작성일14-04-22 13:33 조회20,233회 댓글0건본문
다음과 같은 전달함수를 가진 시스템을 생각해 보자.
(2) K=0.5, 1, 2일 때 견실제어기 =%5Cfrac%7Bs%5E2+26s+269%7D%7B269%7D) 를 사용하여 보상한 시스템의 단위계단응답을 구해보자.
를 사용하여 보상한 시스템의 단위계단응답을 구해보자.
«풀이»
(1) 뒤짐보상기로 보상한 시스템의 단위계단응답
- ex8_8.cem
/* Unit step response */ t = 0:1:0.01; // Lag compensator numc = [10 1]; denc = [100 1]; // K = 0.5num1 = 2500*0.5*numc; den1 = conv([1 25 0], denc) + [0 0 num1]; y1 = step(num1, den1, t); // K = 1num2 = 2500*numc; den2 = conv([1 25 0], denc) + [0 0 num2]; y2 = step(num2, den2, t); // K = 2num3 = 2500*2*numc; den3 = conv([1 25 0], denc) + [0 0 num3]; y3 = step(num3, den3, t); // Plot step response plot(t,y1, t,y2, t,y3)title("Unit-Step Responses of Compensated Systems")xtitle("t Sec")ytitle("Outputs")
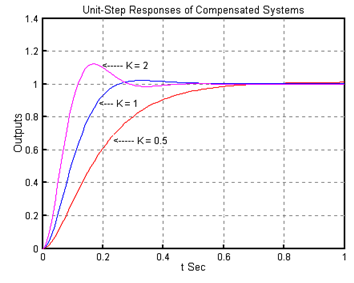
그림 8-의 그래프를 보면 K의 값이 변함에 따라 계단응답이 상당히 변함을 알 수 있다. 이것은 시스템이 K의 값에 민감함을 뜻한다. 즉, 외란 등에 의해 K의 값이 변하면 시스템이 크게 변할 수 있으므로 뒤짐보상기만으로는 견실한 시스템으로 만들 수 없다. (2) 견실제어기로 보상한 시스템의 단위계단응답 견실제어기 을 사용할 때는 폐루프의 전방에 전향제어기
를 놓아야 한다. 그러면, 전체 시스템에 대한 전달함수는 다음과 같아진다.
- ex8_8.cem
- /* Unit step response */t = 0:1:0.01;// Lobust controlnumc = [1 26 269];denc = [269];// K = 0.5 num1 = 2500*0.5*denc;y1 = step(num1, den1, t);// K = 1num2 = 2500*denc;y2 = step(num2, den2, t);// K = 2num3 = 2500*2*denc;y3 = step(num3, den3, t);

그림 8-의 응답곡선으로부터 K의 값이 변해도 계단응답이 거의 변하지 않음을 알 수 있다. 이것은 시스템이 K의 값에 둔감함을 뜻한다. 즉, 외란 등에 의해 K의 값이 변해도 시스템에는 큰 영향을 주지 않는다. 따라서, 보상된 시스템은 견실한 시스템이 된다.
댓글목록
등록된 댓글이 없습니다.