|
346 |
|
state feedback 제어기 설계하기 댓글13개

[자동제어]
|
cemtool |
09-25 |
조회 109156
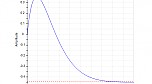
다음과 같은 시스템에서 폐루프 step 응답의 overshoot가 5% 미만이고, 1% settling time이 4.6초 미만이 되도록 state feedback 제어기를 설계하고 CEMTool의 step 명령을 이용하여 조건에 맞는지 검증하시오.
ex7_34.cem/*
Exercise 7.34(b)*/
del *;
"**…
|
|
345 |
|
state feedback 제어기 설계 댓글54개
[자동제어]
|
cemtool |
09-25 |
조회 1287012
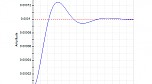
다음과 같은 시스템에서 폐루프 step 응답의 overshoot가 25% 미만이고, 1% settling time이 0.115초 미만이 되도록 state feedback 제어기를 설계하고 CEMTool의 step 명령을 이용하여 조건에 맞는지 검증하시오.
ex7_33.cem/*
Exercise 7.33(b)*/
del *;
…
|
|
344 |

|
변환행렬 구하기 댓글12개
[자동제어]
|
cemtool |
09-24 |
조회 34370
앞의 예제 7.3과 같은 tape 구동 시스템에서 표현식을 modal canonical form으로 유지하되, 크기를 증가시키기 위하여 pole들이 에 나타나도록 하는 state 변환행렬을 구하시오. 그리고 이때 새로운 state 행렬 set A,B,C,D를 구하시오.ex7_10.cem/*
Exercise 7.10(b)*/
d…
|
|
343 |
|
변환행렬 구하기 댓글2개
[자동제어]
|
cemtool |
09-24 |
조회 18978
앞의 예제 7.3과 같은 tape 구동 시스템에서 표현식을 modal canonical form으로 유지하되, 입력 행렬 의 각 element가 unity가 되도록 하는 변환행렬 T를 구하시오.ex7_9.cem/*
Exercise 7.9(b)*/
del *;
"*************************"
…
|
|
342 |
|
state matrices 구하기 댓글53개
[자동제어]
|
cemtool |
09-24 |
조회 1966557
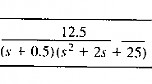
CEMTool의 tf2ss 함수를 이용하여 다음과 같이 전달함수 형태로 주어진 시스템의 state matrices를 구하시오.
ex7_2.cem/*
Exercise 7.2*/
del *;
"**********************"
"** **"
"** Exercise 7.2 **"
…
|
|
341 |
|
sensitivity function 구하기 댓글1개
[자동제어]
|
cemtool |
09-23 |
조회 14947
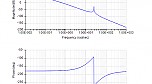
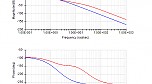
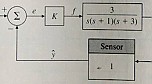
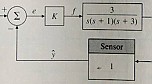
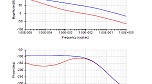
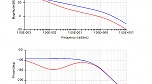
다음과 같은 unity feedback 시스템에서 sensitivity function, complementary sensitivity function, control sensitivity function을 구하고, 주파수에 대한 그들의 크기를 그리시오.
ex6_68.cem/*
Exercise 6.68*/
del *;
"**…
|
|
340 |
|
bode plot, inverse nyquist plo… 댓글59개
[자동제어]
|
cemtool |
09-23 |
조회 502269
다음과 같은 시스템에서 물음에 답하시오.
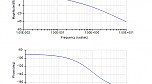
(a) Bode plot과 Nyquist plot을 그리시오.
(b) sensitivity function, complementary sensitivity function을 구하고, 주파수에 대한 그들의 크기를 그리시오.
© 시스템의 inverse Nyquist plot을 그리시오.ex6_67.cem…
|
|
339 |
|
inverse nyquist plot, root loc… 댓글25개
[자동제어]
|
cemtool |
09-23 |
조회 34467
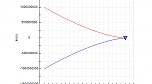
다음 그림과 같은 시스템에서 root locus, Nyquist plot을 그리시오.
ex6_66.cem/*
Exercise 6.66*/
del *;
"************************"
"** **"
"** Exercise 6.66 **"
"** …
|
|
338 |
|
inverse nyquist plot 그리기 댓글51개
[자동제어]
|
cemtool |
09-22 |
조회 186066
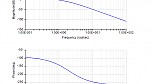
다음과 같은 개루프 시스템의 inverse Nyquist plot을 그리시오.
ex6_65.cem/*
Exercise 6.65*/
del *;
"************************"
"** **"
"** Exercise 6.65 **"
"** …
|
|
337 |
|
bode plot, inverse nyquist plo… 댓글63개
[자동제어]
|
cemtool |
09-22 |
조회 192383
다음 그림과 같은 시스템에서 시스템의 Bode plot과 inverse Nyquist plot, root locus를 그리시오.
ex6_64.cem/*
Exercise 6.64*/
del *;
"************************"
"** **"
"** Exercise 6…
|
|
336 |
|
bode plot, inverse nyquist plo… 댓글4개
[자동제어]
|
cemtool |
09-22 |
조회 18600
다음 그림과 같은 시스템에서 시스템의 Bode plot과 inverse Nyquist plot, root locus를 그리시오.
ex6_63.cem/*
Exercise 6.63*/
del *;
"************************"
"** **"
"** Exercise 6.63 …
|
|
335 |
|
bode plot, inverse nyquist plo… 댓글3개
[자동제어]
|
cemtool |
09-19 |
조회 18354
다음과 같은 불안정한(unstable) plant의 전달함수가 있다.
여기에 제어 loop이 다음 그림과 같이 존재할 때, 시스템의 Bode plot과 inverse Nyquist plot, 그리고 root-locus를 그리시오.
ex6_62.cem/*
Exercise 6.62*/
del *;
"*********…
|
|
334 |
|
inverse nyquist plot, root loc… 댓글18개
[자동제어]
|
cemtool |
09-19 |
조회 28257
다음 그림과 같은 시스템에서 과 같은 inverse Nyquist plot을 그리고, root locus를 그리시오.
ex6_61.cem/*
Exercise 6.61*/
del *;
"************************"
"** **"
"** Exercise 6.…
|
|
333 |
|
root locus 댓글4개
[자동제어]
|
cemtool |
09-19 |
조회 18127
배의 조종 시스템이 다음과 같은 전달함수로 주어진다.
이때 다음과 같은 조건을 만족시키도록 하는 compensator를 설계하고 설계가 완성된 시스템에 대해서 K에 관한 root locus를 그리시오.
● 속도 상수 Kv = 2
● PM≥50°
● 무조건적인 안정성(unconditional stability) - PM>0이고 모든 주…
|
|
332 |
|
lag compensator 댓글4개
[자동제어]
|
cemtool |
09-18 |
조회 17361
개루프 전달함수가 다음과 같은 시스템을 생각하자.
이때, PM가 되고 unity DC gain을 갖는 lag compensator를 설계하시오.ex6_55.cem/*
Exercise 6.55*/
del *;
"************************"
"** **"
"** Ex…
|















