|
76 |

|
보상된 시스템과 아닌 시스템 비교2 댓글3개

[자동제어]
|
cemtool |
04-22 |
조회 22310
전달함수가 다음과 같다.
(1) PI 제어기 를 사용하여 시간영역에서 다음의 성능사양을 만족시키려고 한다. 보상되지 않은 시스템과 , 의 PI 제어기로 보상된 시스템의 단위계단응답을 구하고, 결과를 설명해보자.
포물선입력 b대한 정상상태오차 에 대한 정상상태오차
최대오버슈트
상…
|
|
75 |

|
보상시스템와 아닌 시스템의 비교 댓글72개
[자동제어]
|
cemtool |
04-22 |
조회 53212
다음과 같은 전달함수를 가진 시스템을 생각해 보자.
(1) PD 제어기 를 사용하여 시간영역에서 다음의 성능사양을 만족시키려고 한다. 보상되지 않은 시스템과 , 의 PD 제어기로 보상된 시스템의 단위계단응답을 구하고, 결과를 설명해보자.
단위램프입력에 대한 정상상태오차
최대오버슈트
…
|
|
74 |

|
안정도 판별
[자동제어]
|
cemtool |
04-22 |
조회 20018
다음과 같은 전달함수를 가진 제어시스템을 생각해보자.
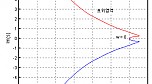
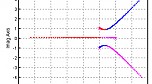
K=7.248,14.5,181.2,273.57일 때 시스템의 안정도를 판별하기 위해 다음과 같은 그래프를 그리고, 결과를 설명해보자.
(1) Bode 선도
(2) Nichols 도표
(3) 폐루프 시스템의 주파수 응답
«풀이»
(1) Bode 선도ex7_11.cem/* Bode pl…
|
|
73 |

|
시스템 안정한 변수찾기 댓글16개
[자동제어]
|
cemtool |
04-22 |
조회 22913
다음과 같은 루프전달함수를 가진 제어시스템을 생각해보자.
Bode 선도, Nyquist 선도, 근궤적선도 등을 사용하여 시스템이 안정하기 위한 K의 값을 구해보자.
«풀이»
먼저 K=1이라고 놓고 Bode 선도를 그려보자.ex7_10.cem// Bode Plot( K = 1 )num = 100*[1 45 200];
den = [1 300 …
|
|
72 |
|
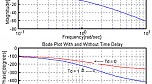
시간지연에 따른 Bode선도 댓글13개
[자동제어]
|
cemtool |
04-22 |
조회 25018
다음은 순수시간지연 를 갖는 선형제어시스템의 전달함수이다.
시간지연이 없을 때()와 시간지연이 초일 때의 Bode 선도를 그리고 두 응답을 비교해보자. 단, 순수시간지연에 대하여 1차 Pade 근사식을 사용하자.
«풀이»
1차 Pade 근사식은 다음과 같다.
K=1이라고 가정하고, 두 경우에 대한 Bode 선도를 그려보자.
ex…
|
|
71 |
|
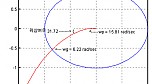
Nyquist 선도
[자동제어]
|
cemtool |
04-22 |
조회 21596
다음과 같은 루프전달함수를 가진 제어시스템을 생각해보자.
시스템의 Nyquist 선도를 그리고, 이득여유와 위상여유를 구해보자.
«풀이»
시스템의 이득여유와 위상여유는 Nyquist 선도가 실수축, 단위원과 만나는 점을 통해 구할 수 있다. 다음은 Nyquist 선도와 단위원을 그리는 프로그램이다.ex7_8.cem/* Nyquist pot */…
|
|
70 |
|
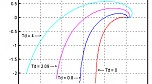
시간지연에 따른 시스템 안정도 댓글47개
[자동제어]
|
cemtool |
04-22 |
조회 44662
다음은 순수시간지연 를 갖는 선형제어시스템의 전달함수이다.
=0, 0.8, 2.09, 4초에 대하여 Nyquist 선도를 그리고 시스템의 안정도를 판별해보자.(단, 순수시간지연에 대하여 1차 Pade 근사식을 사용한다.)
«풀이»
1차 Pade 근사식은 다음과 같다.
ex7_7.cem// Td = 0num1 = 1;
den1…
|
|
69 |
|
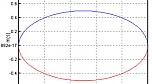
극점에 따른 시스템 안정도 변화 댓글13개
[자동제어]
|
cemtool |
04-22 |
조회 21292
다음과 같은 루프전달함수를 가진 제어시스템을 생각하자.(1) 이 시스템에 s=0인 극점을 첨가함에 따라 시스템의 안정도가 어떻게 변하는지 조사해보자.
«풀이»
먼저 주어진 시스템의 Nyquist 선도를 그려보자. 편의상 K=1이라고 가정한다.ex7_6.cem// No pole at s = 0num = 1;
den = [1 1];
nyquist…
|
|
68 |

|
시스템의 안정한 범위구하기 댓글57개
[자동제어]
|
cemtool |
04-22 |
조회 57929
다음과 같은 루프전달함수를 가진 제어시스템을 생각하자.시스템이 안정하기 위한 K의 범위를 구해보자.
«풀이»
먼저 근궤적선도를 통해 시스템이 안정하기 위한 K의 임계값을 구하고, 실제로 몇 개의 K에 대해서 Nyquist 선도 또는 Routh-Hurwitz 판별법을 통해 결과를 확인해보도록 하자. 다음은 주어진 시스템에 대한 근궤적선도이다.ex7…
|
|
67 |
|
Nyquist 선도4
[자동제어]
|
cemtool |
04-22 |
조회 18192
다음과 같은 루프전달함수를 가진 제어시스템을 생각하자.
(1) K=0.5와 K=2일 때의 Nyquist 선도를 그리고, 시스템의 안정도를 판별해보자.
(2) K=-0.5와 K=-2일 때의 Nyquist 선도를 그리고, 시스템의 안정도를 판별해보자.
«풀이»
(1) K=0.5와 K=2일 때의 Nyquist 선도는 다음의 프로그램을 통해 그릴…
|
|
66 |
|
Nyquist 선도3
[자동제어]
|
cemtool |
04-22 |
조회 16950
다음과 같은 루프전달함수를 가진 제어시스템을 생각해보자.이 시스템에 대한 Nyquist 선도를 그리고, 안정도를 판별해보자.
«풀이»
이 시스템은 최소위상시스템이 아니다. 따라서, Nyquist 선도를 그려 안정도를 판별할 때 주의해야 한다. 먼저 Nyquist 선도를 그려보자.ex7_3.cem/* Nyquist Plot */
num = [1 …
|
|
65 |
|
Nyquist 선도2
[자동제어]
|
cemtool |
04-22 |
조회 17010
다음과 같은 방정식을 가진 시스템을 생각해보자.K=1일 때의 Nyquist 선도를 그려보자.
«풀이»
주어진 방정식을 정리하면 다음과 같은 전달함수를 구할 수 있다.
ex7_2.cem/* Nyquist Plot */
num = [1 2 2 0];
den = [1 5 1];
nyquist(num, den);
title("Nyquist Pl…
|
|
64 |

|
Nyquist 선도1 댓글16개
[자동제어]
|
cemtool |
04-22 |
조회 25403
다음과 같은 전달함수를 가지는 단일루프 되먹임제어시스템을 생각해보자.K = 100, 240, 300일 때의 시스템에 대한 Nyquist 선도를 그리고, 시스템의 안정도를 판별해보자.
«풀이»
(1) K = 100일 때ex7_1.cem// K = 100num = 100;
den = [1 12 20 0];
nyquist(num, den);
ti…
|
|
63 |

|
변수에대한 Root-Locus 2
[자동제어]
|
cemtool |
04-22 |
조회 17783
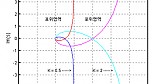
다음과 같은 전달함수를 가진 시스템을 생각해보자.K와 T에 대한 근컨투어를 그려보자.
«풀이»
(1) K에 대한 근컨투어 먼저 T=0이라고 놓으면이다. 이제 다음의 CEMTool 프로그램을 사용하여 근컨투어를 그려보자.
ex6_19.cemnum = [1];
den = [1 3 2 0];
rlocus(num, den);
title("Root…
|
|
62 |
|
변수에 대한 Root-Locus 1
[자동제어]
|
cemtool |
04-22 |
조회 16800
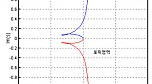
다음과 같은 전달함수를 가진 시스템을 생각해보자.K와 T에 대한 근컨투어를 그려보자.
«풀이»
(1) K에 대한 근컨투어 먼저 T=0 이라고 놓으면이다. 이제 다음의 CEMTool 프로그램을 사용하여 근컨투어를 그려보자.
ex6_18.cemnum = [1];
den = [1 2 2 0];
rlocus(num, den);
title("Roo…
|















