|
301 |
|
root locus 댓글1개

[자동제어]
|
cemtool |
09-04 |
조회 15786
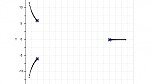
CEMTool을 이용하여 다음과 같이 주어지는 시스템에서 parameter a가 0에서 10까지 변할 때 root-locus의 모습을 조사하시오. 특히, a의 값이 2.5에서 3.5 사이를 변할 때 자세히 조사하시오.
ex5_18.cem/*
Exercise 5.18*/
del *;
"***********************…
|
|
300 |
|
root locus 댓글1개
[자동제어]
|
cemtool |
09-03 |
조회 16444
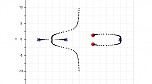
다음 시스템의 root-locus를 그리시오.
ex5_13.cem/*
Exercise 5.13*/
del *;
"***********************"
"** **"
"** Exercise 5.13 **"
"** **"
"*******…
|
|
299 |
|
root locus 댓글24개
[자동제어]
|
cemtool |
09-03 |
조회 20482
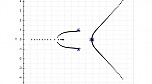
다음과 같은 시스템의 root locus를 그리시오.
ex5_7.cem/*
Exercise 5.7*/
del *;
"**********************"
"** **"
"** Exercise 5.7 **"
"** **"…
|
|
298 |

|
root locus 댓글1개
[자동제어]
|
cemtool |
09-02 |
조회 16457
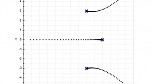
다음과 같은 시스템의 root locus를 그리시오.
ex5_6.cem/*
Exercise 5.6*/
del *;
"**********************"
"** **"
"** Exercise 5.6 **"
"** **"
"*****…
|
|
297 |

|
root locus 댓글22개
[자동제어]
|
cemtool |
09-02 |
조회 20769
다음과 같은 시스템의 root locus를 그리시오.
ex5_5.cem/*
Exercise 5.5*/
del *;
"**********************"
"** **"
"** Exercise 5.5 **"
"** …
|
|
296 |
|
root locus 댓글1개
[자동제어]
|
cemtool |
09-02 |
조회 16451
전달함수가 다음과 같이 주어진 시스템의 root locus를 그리시오.
ex5_4.cem/*
Exercise 5.4*/
del *;
"**********************"
"** **"
"** Exercise 5.4 **"
"** …
|
|
295 |
|
제어기 설계 댓글25개
[자동제어]
|
cemtool |
09-01 |
조회 24694
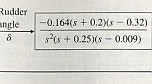
다음 그림은 배의 정확한 항로를 유지하도록 하는 자동 배 조종 시스템(Automatic ship steering control system)으로서 방향타의 편향각과 뱃머리의 방향 사이의 전달함수를 나타낸 것이다. CEMTool을 이용하여, 개루프 시스템이 stable하고 step 입력에 대한 정상 상태의 오차가 0이며 overshoot가 10% 미만이 …
|
|
294 |
|
원하는 사양에 맞는 제어기 설계 댓글54개
[자동제어]
|
cemtool |
09-01 |
조회 44877
그림과 같은 feedback 제어 시스템이 다음과 같은 사양을 만족하도록 설계하려 한다.
(1) ramp 입력에 대한 정상상태의 오차가 10% 미만이어야 한다.
(2) 단위 step 입력에 대한 overshoot가 5% 미만이어야 한다.
(3) 1% settling 시간이 3초 미만이어야 한다.
(f) =32로 하고, 폐루프의…
|
|
293 |
|
Ziegler-Nichols sensitivity를 이… 댓글35개
[자동제어]
|
cemtool |
09-01 |
조회 28218
다음의 그림과 같은 시스템을 생각하자. Ziegler-Nichols sensitivity 방법을 사용하여 시스템의 알맞은 PID 제어기를 설계하고, 개루프의 외란 차단 특성(disturbance rejection property)을 조사하시오.
ex4_19.cem/*
Exercise 4.19*/
del *;
"******…
|
|
292 |

|
응답에 따른 정상 상태 오차 댓글15개
[자동제어]
|
cemtool |
08-26 |
조회 19653
DC-motor의 속도 제어가 다음과 같은 미분 방정식으로 표현된다.
( y: 모터의 속도, va: 전압, w: 부하의 토크)
PI 제어 법칙을 이용하여 계산된 전압이 다음과 같이 주어진다고 가정할 때,
개루프 시스템의 특성 방정식이 에서 근을 갖도록 과 의 값을 정하자. 이 때, 다음과 같은 여러 가지 경우에…
|
|
291 |
|
다양한 제어기의 응답 비교 댓글43개
[자동제어]
|
cemtool |
08-26 |
조회 49811
plant의 전달함수가
과 같이 주어질 때, 어떤 다이나믹 제어기를 추가하여 이고, 를 만족시키려고 한다. 다음과 같은 여러 종류의 다이나믹 제어기를 생각하자.
⑴
⑵
⑶ , zero z = 2이고, pole p = 10 또는 20일 경우
⑷ , zero z = 2이고 pole p…
|
|
290 |
|
P,PD,PID 제어기의 응답특성 댓글5개
[자동제어]
|
cemtool |
08-26 |
조회 18221
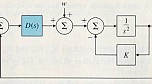
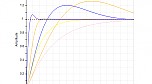
다음과 같은 2차 plant를 생각하자.
로 주어질 때, 왼쪽의 그림에 나타낸 바와 같은 proportional, PD, PID regulator 시스템의 응답 특성을 구하시오. 이 때 unit step reference 입력 r(t)가 들어간다고 가정하시오.
ex4_9.cem/*
Exercise 4.9(d)*/
d…
|
|
289 |
|
폐루프 전달함수의 sensitivity 댓글97개
[자동제어]
|
cemtool |
08-25 |
조회 293139
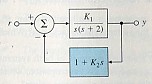
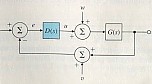
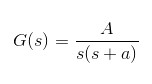
어떤 unity feedback 제어 시스템의 개루프 전달함수가 다음과 같다.
parameter A와 a에 대한 폐루프 전달함수의 sensitivity를 구하고, 또한 feedback gain을 1이 아닌 로 하고 에 대한 폐루프 전달함수의 sensitivity를 구하시오. 그리고 A=1, a=1로 가정하고, CEMTool의 …
|
|
288 |
|
제어기 설계
[자동제어]
|
cemtool |
08-25 |
조회 16818
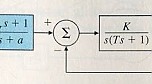
다음 그림은 prefilter와 unity feedback으로 이루어진 시스템이다. 다음과 같은 세 가지의 경우에 대해서 상승시간(rising time)이 1.5초 미만, settling time이 10초 미만, overshoot가 20%미만, 정상상태의 에러(steady-state error)가 5% 미만이 되도록 하는 의 값을 구하시오. 조…
|
|
287 |
|
step 응답 댓글42개
[자동제어]
|
cemtool |
08-25 |
조회 36167
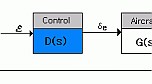
다음의 그림은 어떤 비행체의 고도 θ를 유지하기 위해서 설계된 autopilot의 block diagram이다.
이 때, elevator의 각도 δe와 고도 θ의 관계가 다음과 같은 전달함수의 형태로 표현되고,
autopilot의 제어기는 다음과 같이 elevator를 조정하기 위한 고도 오차 를 이용하며 다음과 같은 전달…
|















