|
79 |

|
전달함수 댓글1개

[자동제어]
|
cemtool |
08-04 |
조회 17096
다음과 같이 state form으로 주어진 cruise-control system의 전달함수를 구하라.
ex3_18p.cem/*
example 3.18 Cruise-control Transfer Function Using CEMTool
*/
del *
"********************************…
|
|
78 |
|
Step 입력에 대한 응답 댓글28개
[자동제어]
|
cemtool |
08-04 |
조회 22520
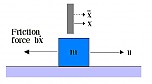
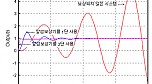
다음의 cruise control model에서 u의 step 입력에 대한 응답을 구하라.
1. u = 500 N
2. m = 1000 ㎏
3. b = 50 N·sec/mex2_8p.cem/*
example 2.8 Cruise-control Step Response
*/
del *;
"******…
|
|
77 |
|
디지털 제어기를 이용한 보상시스템의 응답 댓글57개
[자동제어]
|
cemtool |
04-22 |
조회 195828
다음과 같은 전달함수를 가진 이산시간 시스템을 생각해 보자.데드비트응답을 위해 다음과 같은 디지털 제어기를 사용하려고 한다.
즉,보상시스템의 단위계단응답을 구해보자.
«풀이»ex9_3.cem/* Unit step response */
n = 0:7;
numz = 0.1152*[1 0.9217];
denz = [0.22138 -0.1152 -…
|
|
76 |
|
뒤짐보상기, 앞섬보상기 응답에 대한 결과 댓글13개
[자동제어]
|
cemtool |
04-22 |
조회 36488
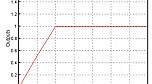
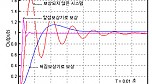
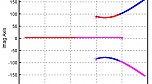
다음과 같은 전달함수를 가진 시스템을 생각해 보자.
(1) 주어진 전달함수를 z영역에서의 함수로 변환해보자. 단, 0차 홀드를 포함하고, 샘플링주기 T=0.01초이다.
(2) 보상되지 않은 시스템과 뒤짐보상기 로 보상한 시스템, 그리고 앞섬보상기 로 보상한 시스템의 단위계단응답을 구해보자. 또, 각각에 대하여 Bode 선도를 그…
|
|
75 |
|
부분분수 전개
[자동제어]
|
cemtool |
04-22 |
조회 18666
다음 디지털 제어기의 전달함수를 부분분수 전개해보자.
«풀이»
z영역에서 부분분수전개를 할 때는 residuez 함수를 사용한다.ex9_1.cemnum = [10 5];
den = [1 -1.2 0.2];
[r, p, k] = residuez(num, den)r =
18.7500
-8.7500
p = …
|
|
74 |
|
상태되먹인 제어의 이득행렬
[자동제어]
|
cemtool |
04-22 |
조회 18516
다음과 같은 시스템 방정식을 가진 시스템을 생각해 보자.
이다. 여기서
이다. 상태되먹임 제어 u=-Kx를 사용하여 폐루프극점을
에 위치시키려고 한다. 필요한 상태되먹임 이득행렬 K를 구해보자.
«풀이»ex8_10.cem/* Determination of state feedback gain matrix K */
A …
|
|
73 |
|
견실제어기
[자동제어]
|
cemtool |
04-22 |
조회 19170
다음과 같은 전달함수를 가진 시스템을 생각해 보자.
보상되지 않은 시스템과 견실제어기 로 보상한 시스템의 K에 대한 근궤적선도를 그리고, 견실제어기의 영향을 설명해보자.
«풀이»
근궤적선도를 그릴 때는 폐루프의 전방경로에 있는 을 고려하지 않음에 유의하라.즉,의 개루프 전달함수에 대하여 근궤적선도를 그린다. 다음은 두 …
|
|
72 |
|
뒤짐보상기로 보상한 시스템의 단위계단응답
[자동제어]
|
cemtool |
04-22 |
조회 20286
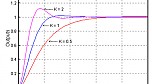
다음과 같은 전달함수를 가진 시스템을 생각해 보자.(1) K=0.5, 1, 2일 때 a=0.1, T=100 인 뒤짐보상기 를 사용하여 보상한 시스템의 단위계단응답을 구해보자.
(2) K=0.5, 1, 2일 때 견실제어기 를 사용하여 보상한 시스템의 단위계단응답을 구해보자.
«풀이»
(1) 뒤짐보상기로 보상한 시스…
|
|
71 |
|
노치제어기 댓글42개
[자동제어]
|
cemtool |
04-22 |
조회 48267
다음과 같은 전달함수를 가진 시스템을 생각해 보자.(1) 이 시스템을 정확하게 극점을 상쇄하는 노치제어기 를 사용한 후 두 번째 단계로 a=0.005, T=10인 뒤짐보상기 를 사용한 경우와 , 인 PI 제어기 를 사용한 경우의 단위계단응답을 구하고 결과를 설명하여라.
(2) 실제적으로 (1)과 같이 …
|
|
70 |

|
뒤짐보상기 댓글56개
[자동제어]
|
cemtool |
04-22 |
조회 42999
다음과 같은 전달함수의 시스템을 생각해 보자.뒤짐보상기 를 사용하여 시스템을 보상하려고 한다.
(1) 보상되지 않은 시스템과 a=0.09, T=30일 때의 뒤짐보상기 를 사용하여 보상한 시스템의 단위계단응답을 구하고, 결과를 설명해보자.
(2) 보상되지 않은 시스템과 a=0.1, T=30일 때의 뒤짐보상…
|
|
69 |
|
앞섬보상기 댓글3개
[자동제어]
|
cemtool |
04-22 |
조회 20015
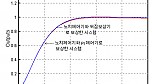
다음과 같은 전달함수를 가진 시스템을 생각해 보자.이 시스템을 앞섬보상기 를 사용하여 보상하려고 한다. 단위계단응답을 구하고, Bode 선도를 그려라. 또, 앞섬보상기 를 하나 더 사용해 시스템을 보상하면 어떻게 되는지 설명해보자.
«풀이»
다음은 보상되지 않은 시스템과 앞섬보상기 를 가진 시스템, 그리고 앞섬보상기&n…
|
|
68 |

|
앞섬보상기
[자동제어]
|
cemtool |
04-22 |
조회 20584
다음과 같은 전달함수를 가진 시스템을 생각해 보자.앞섬보상기 를 사용하여 시스템을 보상하려고 한다.
(1) 보상되지 않은 시스템과 a=12.5, T=0.004일 때의 앞섬보상기 를 사용하여 보상한 시스템의 단위계단응답을 구하고, 결과를 설명해보자.
(2) 보상되지 않은 시스템과 a=2.46, T=0.01…
|
|
67 |

|
PD,PI,PID 제어기 보상시스템
[자동제어]
|
cemtool |
04-22 |
조회 25585
다음과 같은 전달함수를 가진 시스템을 생각해 보자.시스템의 성능을 개선하기 위해 다음과 같은 제어기를 사용하려고 한다.
PD 제어기 :
PI 제어기 :
PID 제어기 :
(1) 각 제어기로 보상한 시스템의 단위계단응답을 구해보자.
(2) 각 제어기로 보상한 시스템의 Bode 선도를 그려보자.
…
|
|
66 |

|
보상된 시스템과 아닌 시스템 비교2 댓글3개
[자동제어]
|
cemtool |
04-22 |
조회 22279
전달함수가 다음과 같다.
(1) PI 제어기 를 사용하여 시간영역에서 다음의 성능사양을 만족시키려고 한다. 보상되지 않은 시스템과 , 의 PI 제어기로 보상된 시스템의 단위계단응답을 구하고, 결과를 설명해보자.
포물선입력 b대한 정상상태오차 에 대한 정상상태오차
최대오버슈트
상…
|
|
65 |

|
보상시스템와 아닌 시스템의 비교 댓글72개
[자동제어]
|
cemtool |
04-22 |
조회 53091
다음과 같은 전달함수를 가진 시스템을 생각해 보자.
(1) PD 제어기 를 사용하여 시간영역에서 다음의 성능사양을 만족시키려고 한다. 보상되지 않은 시스템과 , 의 PD 제어기로 보상된 시스템의 단위계단응답을 구하고, 결과를 설명해보자.
단위램프입력에 대한 정상상태오차
최대오버슈트
…
|















