















자동제어 | PD,PI,PID 제어기 보상시스템 |
페이지 정보
작성자 cemtool 작성일14-04-22 13:31 조회25,585회 댓글0건본문
다음과 같은 전달함수를 가진 시스템을 생각해 보자.
- PD 제어기 :
- PI 제어기 :
- PID 제어기 :
(1) 각 제어기로 보상한 시스템의 단위계단응답을 구해보자.
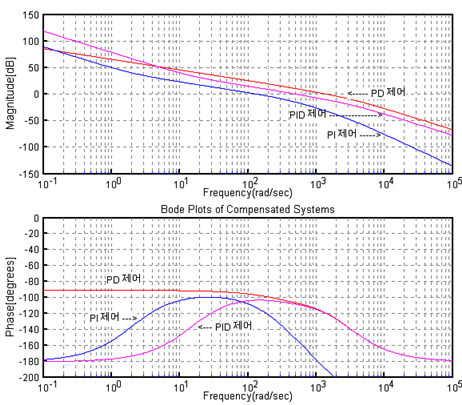
(2) 각 제어기로 보상한 시스템의 Bode 선도를 그려보자.
«풀이»
(1) 단위계단응답
- ex8_3.cem
/* Unit step response */ num = 2.718e9; den = [1 3408.26 400.26*3008 0]; t = 0:0.1:0.001; // PD control numc1 = conv(num, [0.002 1]); denc1 = den + [0 0 numc1]; yc1 = step(numc1, denc1, t); // PI control numc2 = conv(num, [0.075 0.15]); denc2 = [den 0] + [0 0 0 numc2]; yc2 = step(numc2, denc2, t); // PID control numc3 = conv(num, [0.0006 0.309 4.5]); denc3 = [den 0] + [0 0 numc3]; yc3 = step(numc3, denc3, t); // Plot step response plot(t,yc1, t,yc2, t,yc3)title("Unit-Step Responses of Compensated Systems")xtitle("t Sec")ytitle("Outputs")
결과로 나온 단위계단응답 곡선을 그림 8-1에 나타내었다.
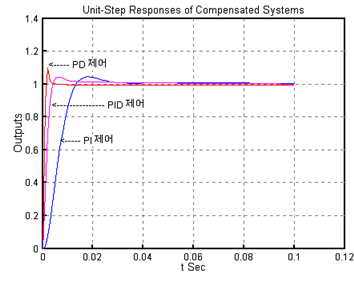
상승시간이나 정착시간 사양을 개선시킬 때는 PD 제어가 좋으며 최대오버슈트 사양을 개선할 때는 PI 제어가 좋다는 것을 알 수 있다. 예상대로 PID 제어기를 사용한 시스템의 단위계단응답은 PD 제어와 PI 제어의 특성을 적당히 혼합한 형태가 나왔다.
(2) Bode 선도
- ex8_3.cem
/* Bode plot */ num = 2.718e9; den = [1 3408.26 400.26*3008 0]; w = logspace(-1, 5, 500); // PD control numc1 = conv(num, [0.002 1]); denc1 = den; bode(numc1, denc1, w); holdon // PI control numc2 = conv(num, [0.075 0.15]); denc2 = [den 0]; bode(numc2, denc2, w); // PID control numc3 = conv(num, [0.0006 0.309 4.5]); denc3 = [den 0] ; bode(numc3, denc3, w); title("Bode Plots of Compensated Systems")
프로그램을 실행시키면 그림 10-의 Bode 선도를 얻을 수 있다.
댓글목록
등록된 댓글이 없습니다.